Consider the dynamical system in .
If consists of only linear functions, then the system is called linear, otherwise the system is nonlinear.
Let be the coefficient matrix of a linear system, the system can be denoted by
Harmonic Oscillation
Solution:
For :
So
For
From the eigen-decomposition:
Add them (real part):
Divide by 2 to normalize:
Subtract them (imag part), multiply by :
Divide by (-2) for a cleaner solution:
Combine:
Now you have two independent solutions:
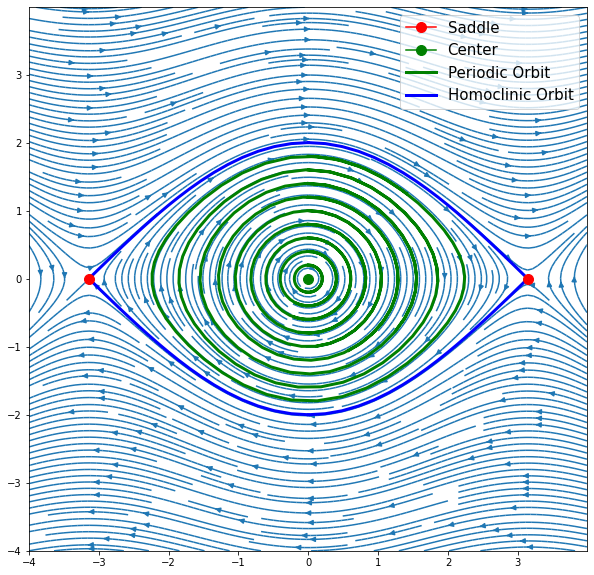
Pendulum
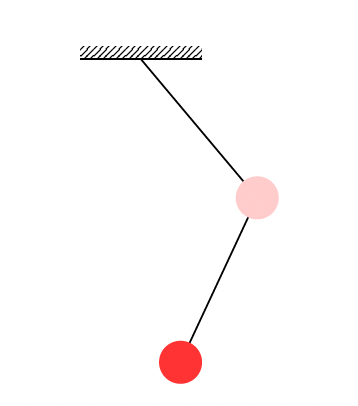
Double Pendulum
Is harder to understand
A nonlinear system is generally more challenging than a linear system (e.g., oscillator vs. pendulum).
A system with more degrees of freedom is typically more difficult to analyze than a system with fewer degrees of freedom (e.g., pendulum vs. double pendulum).
We can try to find
Fixed points: Points from which the system remains at rest.
Periodic orbits: Orbits that return to the initial point after a certain (finite) time.
Homoclinic/heteroclinic orbits: Orbits that connect a fixed point to itself or to another fixed point over infinite time.