3.2 General Concepts for Nonlinear Dynamics
Limit Sets
Omega Limit Point
is a limit point of if a sequence of time such that
we denote this as
it gets arbitrarily close infinite times
Alpha Limit Point
is a limit point of if a sequence of time such that
we denote this as
Examples
Limit Points and Fixed points
if is a fixed point then so:
Limit Points and Periodic Orbits
Let be a periodic orbits for
Limit Points and Heteroclinic Orbits
Let be a heteroclinic orbit connecting two fixed points and
Then one sees that and .
Limit Points and Homoclinic Orbits
Let be a homoclinic orbit connecting a fixed point to itself
Then one sees that .
Limit Sets and Homoclinic Orbits
Consider the IVP of the system
We have discussed whether the origin belongs to or in the table below.
Bounded and Closed Sets
For
Bounded: st
Closed:
Compact: Closed and bounded
Invariant Sets:
Positively Invariant
if
Negatively Invariant
if
Invariant
If it is both positively and negatively invariant
Stable/Unstable Sets
Stable Set
For a fixed point the stable set of
note
Unstable Set
For a fixed point the unstable set of
note
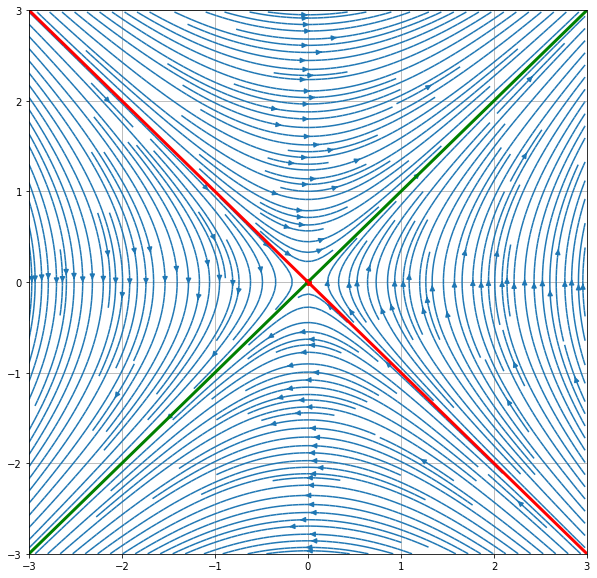
Example
The coefficient matrix has eigenvalues , , and eigenvectors and respectively.
The general solution reads
Thus we see that